RIABILITAZIONE
Le indicazioni terapeutiche si collocano nella riabilitazione dei pazienti con problemi di mobilità a causa di ictus, paresi, traumi cerebrali, malattie degenerative o danni alle articolazioni.
Lo scopo della terapia su questo nuovo dispositivo è il ripristino della funzione locomotoria e del controllo dell’equilibrio.
La macchina può essere impostata in base della capacità individuale del paziente, grazie a ciò vengono soddisfatti i moderni concetti di riabilitazione che prediligono allenamenti ripetitivi e mirati.
Scopo della terapia
L’obiettivo della riabilitazione del cammino è il ripristino della capacità e dell’autonomia locomotoria nella vita quotidiana. Obiettivi centrali per la riabilitazione del cammino sono perciò non solo la ripresa della deambulazione nel piano, ma anche la capacità di superare scale, ostacoli improvvisi ed irregolarità del suolo.
L’impegno fisico per esercitarsi nella riabilitazione nel piano sia per i terapisti ma soprattutto nei pazienti è notevole, è assai più gravoso per entrambi l’impegno sulle scale. Per questo la durata e l’ intensità di una seduta di terapia è spesso limitata dalla forza e dalla resistenza fisica del fisioterapista e non è possibile valutare oggettivamente se ci sono dei miglioramenti nei pazienti.
I dispositivi robotici per la riabilitazione degli arti inferiori finora disponibili effettuano solamente il cammino nel piano ed obbligano il totale movimento dell’arto. La novità del Geo System sta nel lasciare libera l’articolazione delle ginocchia, quindi si da la possibilità al paziente di collaborare in maniera attiva alla terapia.
La seconda innovazione è l’esercizio sulle scale, punta non solo ad un esercizio ripetitivo ma anche ad una facilitazione dei muscoli degli arti inferiori per attivare la fase di oscillazione il più fisiologicamente possibile. Inoltre, riuscire a superare gli ostacoli che possono costituire una barriera architettonica, è importante per riabituarsi a controllare e mantenere l’equilibrio nelle attività della vita quotidiana.
Con questo nuovo dispositivo è possibile esercitarsi nel cammino in tutte le situazioni che possono avvenire nella locomozione umana nell’ attività della vita quotidiana.
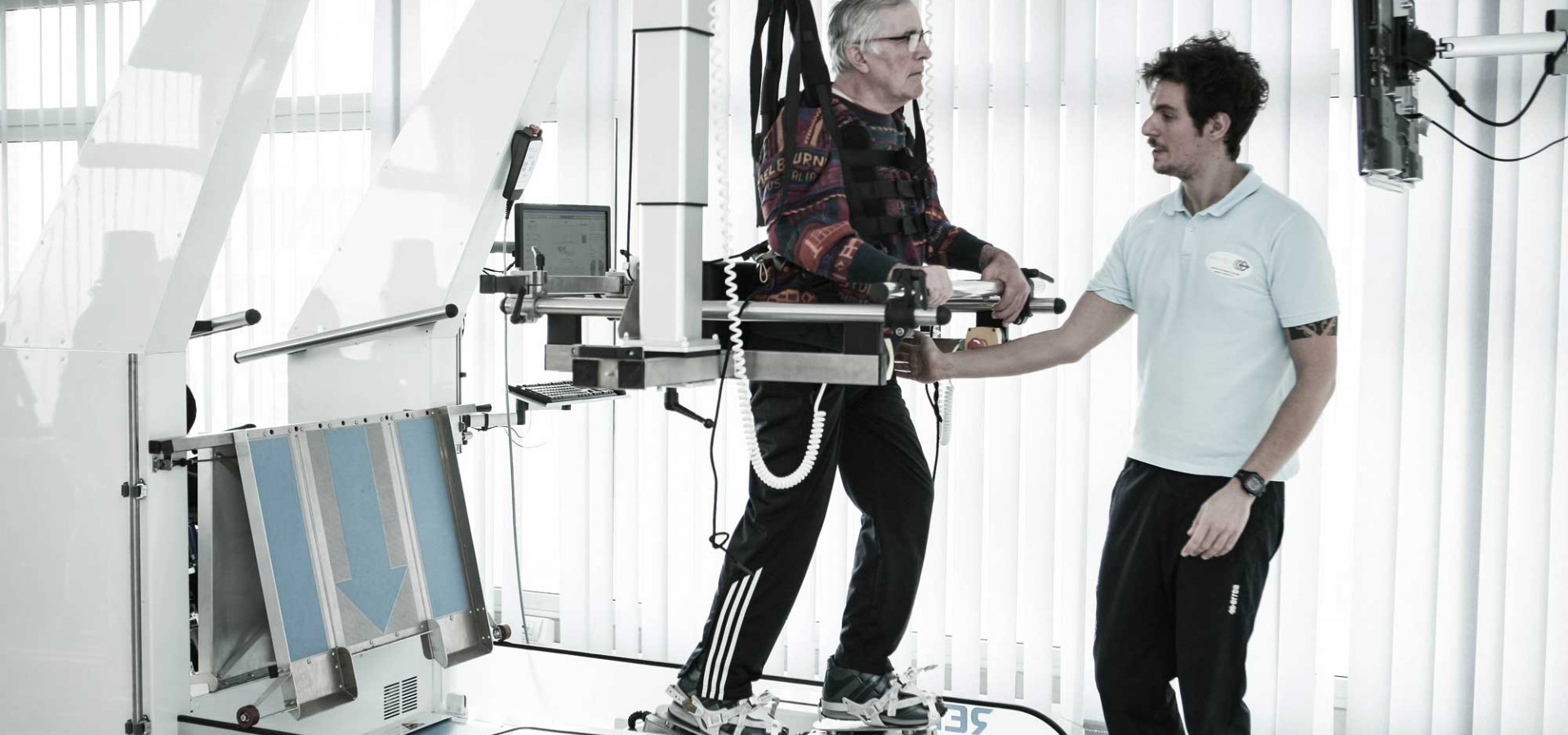
Descrizione del dispositivo
Il robot segue il principio dell’effettore finale. Il paziente imbracato e fissato su un sistema di scarico del peso corporeo sta in piedi su di due piattaforme, le cui traiettorie sono liberamente programmabili nel piano sagittale. Attualmente il dispositivo è in grado di simulare l’allenamento ripetitivo di tre situazioni rilevanti per la locomozione nella vita quotidiana: il cammino nel piano, l’ascesa e la discesa delle scale.
I piedi del paziente vengono fissati alle piattaforme attraverso degli attacchi, i quali, per ragioni di sicurezza, del paziente si aprono quando nella caviglia viene raggiunta una coppia prestabilita. Le piattaforme vengono mosse in alto e in basso, in avanti e indietro ed inclinate attraverso sei motori. Lo spazio di lavoro per le traiettorie è di 65 cm x 40 cm, che risulta in una lunghezza massima del passo di 55 cm, un altezza massima di 27 cm e degli angoli massimi di rotazione per la caviglia di ±90°. La velocità massima ottenibile è di 2 km/h, e corrisponde a delle accelerazioni di al massimo 1 g.
La traiettoria di base, per simulare il cammino nel piano, è stata calcolata a partire dai dati disponibili nella letteratura scientifica disponibile per i soggetti sani (analisi biomeccaniche di Winter). Anche le traiettorie per il controllo del baricentro sono stati calcolati partendo da questi dati. Per simulare il movimento di ascesa e discesa delle scale, sono state misurate le traiettorie di soggetti sani con un sistema di marker attivo ad ultrasuoni (Zebris). Le traiettorie del controllo del baricentro invece sono state prese dalla letteratura scientifica disponibile (analisi biomeccaniche di McFayden e Winter).
Le traiettorie sono calcolate in coordinate relative rispetto all’anca, che quindi rappresenta il giunto finale della catena cinematica. Il paradigma meccanico di progettazione assicura la flessione e l’estensione delle articolazioni intermedie della catena cinematica, cioè del ginocchio e dell’anca, risulti pari all’attività fisiologica.
Il movimento del baricentro può essere regolato in tre dimensioni, dinamicamente in verticale e in orizzontale, staticamente nel verso della locomozione. Il sistema di scarico del peso comprende un elevatore per pazienti, per aiutare il paziente ad alzarsi dalla sedia a rotelle.
Grazie ad una rampa, il paziente può essere spinto sulla sua sedia a rotelle da dietro fino alla posizione di fissaggio, oppure può salire con l’aiuto di un solo terapista.
Evidenza clinica del nuovo robot ad effettore finale
I primi lavori scientifici presentati per il nuovo sistema per ora mostrano la fisiologicità del movimento di deambulazione durante la terapia sul robot. Seguiranno studi randomizzati, controllati, multicentrici sull’efficacia clinica.
Hesse S, Waldner A, Tomelleri C, Kollreider A, Ram D. Gait robot for the repetitive practice of floor walking and stair climbing up and down of wheelchair-dependent patients. In pubblicazione sul Journal of NeuroEngineering and Rehabilitation.
L’attività muscolare di otto muscoli importanti per la locomozione è stata rilevata attraverso elettromiografia durante le condizioni reali e simulate del cammino nel piano e dell’ascesa su scale per un totale di sei pazienti emiparetici. I pazienti sono stati inoltre sottoposti ad allenamento locomotorio robotico ogni giorno feriale per un periodo di cinque settimane.
Per l’analisi elettromiografica è stata riscontrato un leggero ritardo nell’attivazione del quadricipite sul robot, tutti gli altri muscoli hanno mostrato un pattern più fasico. L’effetto dell’ allenamento è stato positivo per tutti i pazienti, la capacità locomotoria è migliorata per tutti e non si sono riscontrati effetti collaterali.
Waldner A, Hesse S. Terapia robotica su scale: una nuova frontiera in neuroriabilitazione. In pubblicazione sugli atti del 37o congresso nazionale della Società Italiana di Medicina Fisica e Riabilitazione (SIMFER).
É stata effettuata su di un soggetto sano. Le condizioni sotto esame sono state il cammino reale e simulato sul robot nel piano e durante l’ascesa delle scale. La deambulazione nella condizione reale è stata adattata alle capacità massime del robot. Il cammino reale nel piano e dell’ascesa reale delle scale quindi sono stati eseguiti ad una velocità ridotta rispetto a quella fisiologica.
L’attività muscolare rilevata per il cammino nel piano e l’ascesa delle scale sul robot è risultata paragonabile a all’attività fisiologica dei muscoli interessati secondo quanto riportato nella letteratura scientifica. Laddove le attività non fossero risultate equivalenti a quanto descritto nella letteratura, le attività dei singoli muscoli nella condizione di cammino simulato sono risultate essere paragonabili all’attività reale misurata. La causa principale delle attivazioni prolungate è stata individuata nella velocità ridotta del dispositivo, pensato però per pazienti non deambulanti, o limitatamente ambulanti, per i quali le velocità risultano adeguate.
Evidenza scientifica del principio dell’effettore finale per la riabilitazione locomotoria
Vengono presentati di seguito alcuni studi rilevanti sull’utilizzo di robot per gli arti inferiori all’ interno di un programma di terapia locomotoria. É da tenere a mente che i risultati sono stati ottenuti con il solo allenamento nel piano, e quindi senza la promettente variazione dell’allenamento locomotorio sulle scale e su traiettorie personalizzabili.
Hesse S, Werner C, Uhlenbrock D, v Frankenberg S, Bardeleben A, Brandl-Hesse B. An electromechanical gait trainer for restoration of gait in hemiparetic stroke patients: preliminary results. Neurorehabilitation and Neural Repair, 2001 15:39-50.
– 14 pazienti cronici post ictus non deambulanti hanno partecipato al protocollo di tipo baseline. Durante le 3 settimane di fisioterapia convenzionale, le funzioni locomotorie non sono cambiate, durante le susseguenti 4 settimane di allenamento locomotorio su robot le capacità di deambulazione sono migliorate considerevolmente (11 pazienti sono diventati deambulanti almeno con aiuto di un fisioterapista) e pure gli arti inferiori sono migliorati.
Werner C, v Frankenberg S, Treig T, Konrad M, Hesse S. Treadmill training with partial body weight support and an electromechanical gait trainer for restoration of gait in subacute stroke patients. Stroke 2002;33:2895-2901.
– 30 pazienti post ictus subacuti, non deambulanti sono stati assegnati in modo randomizzato a uno dei due gruppi di intervento, ABA o BAB (A: 2 settimane di terapia su robot, B: 2 settimane di fisioterapia). Tutti i pazienti hanno migliorato la loro capacità deambulatoria durante il periodo delle sei settimane di trattamento, il trattamento su robot è risultato meno faticoso per il fisioterapista e alla fine della terza fase, i pazienti A erano capaci di camminare meglio e più velocemente.
Pohl, M, Werner C, Holzgraefe M, Kroczek G, Mehrholz J, Wingendorf I, Hölig G, Koch R, Hesse S. Repetitive locomotor training and physiotherapy improve walking and basic activities of daily living in subacute, non-ambulatory stroke patients: a single-blind, randomised multi-centre trial (DEutsche GAngtrainerStudie, DEGAS). Clin Rehabil 2007;21:17-27.
– 155 pazienti post ictus subacuti, non deambulanti sono stati assegnati a uno dei due gruppi A o B. (A=20 min robot + 25min fisioterapia,. B= 45 min fisioterapia), per quattro settimane. Le variabili primarie sono state la capacità deambulatoria(FAC) e la competenza nelle attività della vita quotidiana(Barthel Index). La combinazione di robot + fisioterapia si è dimostrata superiore, alla fine dell’ intervento 41 di 77 Pazienti del gruppo Aera in grado di camminare in modo autonomo, a confronto di soli 17 su 78 pazienti del gruppo B. Al follow up l’effetto è perdurato. I pazienti A inoltre hanno raggiunto un ADL nettamente superiore.
Tong RKY, NG MFW, Li LSW. Gait training by mechanical gait trainer and functional electrical stimulation for subacute stroke patients: a randomised controlled study. Arch Phys Med Rehabil 2006;87:1298-304.
– 50 pazienti post ictus subacutisono stati suddivisi in modo randomizzato in tre gruppi: terapia robotica, terapia robotica + stimolazione elettrica funzionale, o fisioterapia. Le variabili principali sono state il FAC, la velocità di deambulazione e la forza muscolare degli arti inferiori. I pazienti del gruppo r di terapia robotica e del gruppo terapia robotica + stimolazione elettrica funzionale era in grado di camminare meglio e più velocemente alla fine dell’intervento della durata di quattro settimane, in confronto al gruppo fisioterapia. Al follow up, gli effetti si sono mantenuti (descritto da Ng MF et al, Stroke 2008;39:154-60).
Mehrholz J, Werner C, Hesse S, Pohl M. Immediate and longterm functional impact of repetitive locomotor training as an adjunct to conventional physiotherapy for non-ambulatory patients after stroke. Disabil Rehabil 2007;4:1-7.
Da un sottocampione dello studio DEGAS è stata misurata l’attività cardiaca massima e minima, per un totale di 71 soggetti che avevano effettuato sia l’allenamento su dispositivo robotico che la sola fisioterapia. Oltre alla capacità locomotoria superiore, i pazienti del gruppo che aveva effettuato terapia robotica erano in grado di sostenere frequenze cardiache superiori, favorendo così un allenamento cardiocircolatorio. Oltre all’ intensità maggiore (un numero maggiore di passi), la terapia robotica ha contribuito a migliorare il quadro cardiocircolatorio dei pazienti, il che ha contribuito a sua volta all’ incremento delle capacità locomotorie.